PSYONIC partners with ABB Robotics to apply human touch to robot dexterity
PSYONIC is combining its Ability Hand with ABB Robotics' GoFa cobot arm to apply data from prosthetics users to robotic grasping. The post PSYONIC partners with ABB Robotics to apply human touch to robot dexterity appeared first on The Robot Report.

Overview
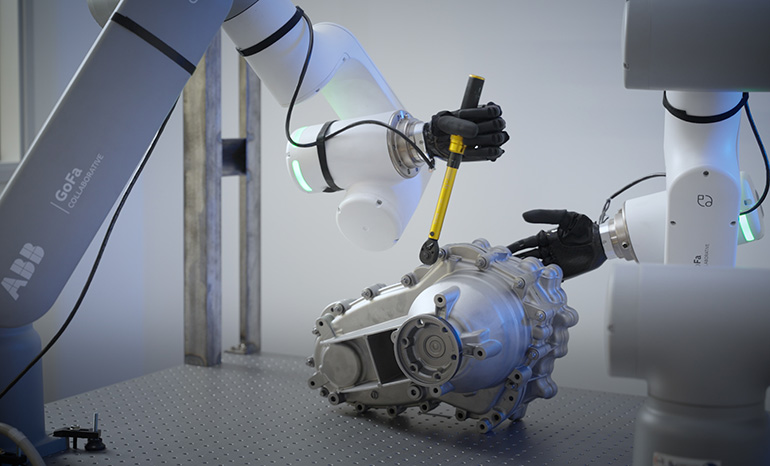
GoFa helps test PSYONIC’s Ability Hand for robotics, combining touch sensing, compliant design, and human-derived training data. Source: ABB Robotics
ABB Robotics LLC today said it is collaborating with PSYONIC to advance dexterous robotic manipulation by using real-world data from human prosthetic users. The partners are combining ABB’s GoFa force- and power-limited robot with the PSYONIC Ability Hand to explore how touch and motion data can train robots to perform tasks that have been difficult to automate.
ABB Robotics added that manipulation is central to its “Autonomous Versatile Robotics” (AVR) goal of robots that can sense, reason, move, and precisely handle objects in dynamic environments. The ability to learn from real-world interactions and reliably apply those lessons will also advance physical AI, said the company, which ABB Group sold to SoftBank for $5.3 billion in October 2025.
“Human dexterity and the instinctive understanding of how to handle different objects is one of the most difficult things to replicate in industrial-grade robotics, but it’s a fundamental need for truly autonomous and versatile robots,” stated Marc Segura, president of ABB Robotics.
“As we develop the next-generation physical AI, robots will learn and understand the world as we do,” he added. “This collaboration with PSYONIC will help to close the long-standing gap between human and robot dexterity, opening up new possibilities for a wide range of industries.”
 Submit your session idea for the 2026 RoboBusiness
Submit your session idea for the 2026 RoboBusinessPSYONIC finds prosthetic, industrial requirements converging
Founded in 2015, PSYONIC originally developed its Ability Hand for prosthetic use. It combines myoelectric control, touch sensing, and compliant mechanics in a lightweight, multi-articulating design. The gripper‘s pressure sensors and vibration feedback system enable users to detect contact, grip force, and release, while flexible fingers conform naturally to irregular and deformable objects.
“Our prosthetic hand has already been FDA-approved, and we’ve got over 300 patients using it already,” Dr. Adeel Akhtar, founder and CEO of PSYONIC, told The Robot Report. “It’s covered by Medicare in the U.S., but when we did our nationwide release, Meta was an early purchaser. We started more on the prosthetic side and less on the robotic side, but in the past year, that has flipped because physical AI has been exploding.”
Suction and parallel jaw grippers have limitations, such as needing a tool changer, which can be a point of delay, failure, or time-consuming maintenance, he said. With deformable objects such as clothing and workcells built around humans, a five-fingered hand made sense for both industrial and service tasks.
“When we approached ABB, we saw parallels,” noted Akhtar. “A lot of the problems that we solved on the prosthetics side — robustness, consistency, tactile feedback for high-mix, low-volume handling — are the same for industrial users. At home, it might be washing dishes or folding laundry, and at work, it’s pick-and-place operations or stocking shelves.”
San Diego-based PSYONIC wants to provide the full technology stack, from human-generated training data through the robotic hand using models based on that data, said Akhtar.
“Dexterous manipulation is ultimately a data challenge as much as a hardware challenge,” Akhtar said. “By using the same Ability Hand on people and on robots, we can capture high-fidelity real-world data on movement, contact, and grip force, then use that to train robotic systems more effectively.”

Dexterity is central to Autonomous Versatile Robotics, ABB ‘s vision for robots that can sense, reason, move and handle objects with precision. Source: ABB Robotics
Integrated manipulation yields better training data
Improved grasping and digital integration could reduce engineering time by up to 30%, according to the International Federation of Robotics (IFR). PSYONIC is working closely with ABB Robotics’ research and development team to explore how touch-enabled manipulation can support next-generation robotics applications.
The GoFa collaborative robot allows for precise measurement of grip force, finger positioning, and movement. These are essential for translating human-derived manipulation data into reliable robot performance across complex, variable tasks, the company said.
Details
“A lot of training is done through teleoperation, through gloves or a VR system, or through video analysis, but this gives only position information,” Akhtar explained. “If you’re grabbing a coffee mug, for example, you’re not really worrying too much about where your fingers are positioned. Our human users know exactly how much pressure to apply to an object, because they can feel the touch sensors through the hand.”
“And then by gathering that tactile information and synching it to multimodal data, say Meta Ray-Ban cameras, we can actually get the full picture of the amount of pressure, finger speeds, and torques we need to apply to maintain a firm grasp so that you’re not going to drop the mug,” he said. “If you’re holding like an object like a raspberry, this is how delicate you need to move the finger so you don’t crush it, right? And that’s information that we can get very readily from our human prosthetic users.”
PSYONIC is working with ABB and NVIDIA‘s Isaac Lab and GR00T to train vision-language-action (VLA) and world models. It has found that models need less data if they have high-quality, multimodal data rather than teleoperation or video analyses, said Akhtar.
“We can use GoFa as a proving ground to show how we can translate data from human users to teach robots to do tasks like using torque wrench on a car engine,” he said. “ABB is already already working with industrial partners that can benefit from the algorithms and AI that we develop based on our human users doing these same tasks. Volume on the robotics side can help access to robotic limbs.”
ABB Robotics and PSYONIC start with three industries
ABB Robotics said its collaboration with PSYONIC reflects its strategy of working with partners across its ecosystem to overcome long-standing barriers to automation. The partners plan to evaluate how human-provided data, AI, and cobots can handle variable, fragile, or complex items for use cases where conventional gripping technologies have struggled to provide a return on investment.
“We’re assessing over the next six to 12 months how to get to over 99% reliability,” Akhtar said. “We’re initially tackling pick-and-place tasks in automotive and warehouse. Another big one for us is laboratory automation in life sciences — handling beakers and test tubes is a huge market.”
In addition, the companies will explore applications across industries including aerospace, packaging, and logistics. PSYONIC and ABB Robotics are already working at a high level to improve the human-to-robot data loop and ultimately improve productivity, flexibility, and workplace safety, said Akhtar.
PSYONIC is also working on the next version of its robotic hand. While the company is focusing on human-inspired form factor, the gripper is intended to work across embodiments, from cobots and industrial automation to wheeled and legged robots, as well as humanoids.
At Automate in Chicago next week, PSYONIC will exhibit at Booth 1690, and ABB Robotics will be at Booth 1241.
PSYONIC is working with ABB Robotics to explore how touch-enabled manipulation can support next-generation robotics applications. Source: ABB Robotics
The post PSYONIC partners with ABB Robotics to apply human touch to robot dexterity appeared first on The Robot Report.
Source
Originally published at www.therobotreport.com.
Related Articles
Source: https://www.therobotreport.com/psyonic-abb-robotics-partner-apply-human-touch-data-robot-dexterity/

